레이저 스캐너 모범 사례

개요
효율적이고 비용 효과적인 방식으로 정확하고 전문적인 스캔을 캡처하는 데 있어 신중하게 계획하고 스캔의 원리를 이해하는 것이 필수적입니다. 이 지침은 스캔 프로젝트를 수행하는 동안 많은 사람들이 겪는 일반적인 문제를 해결하는 데 도움이 됩니다.
사이트 스케치
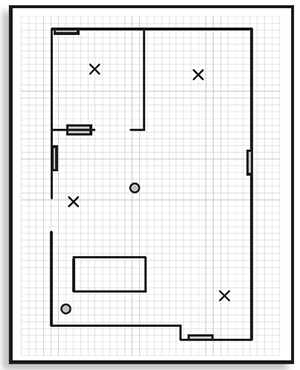
스캔 사이트의 빠른 스케치를 통해 시간을 절약하고 최적의 스캔 위치를 결정할 수 있습니다. 또한 장애물, 필요한 전력과 추가 장비 등 스캔 프로젝트에 영향을 미칠 수 있는 추가 물리적인 제한을 식별하는 데도 도움이 됩니다. 프로젝트 사이트가 기존 실외 구조물인 경우 Google Earth나 기타 위성 이미지를 인쇄하는 것이 스캔 전략을 구성하는 좋은 방법입니다.

손으로 그린 스케치도 효과적인 도구입니다.
파일 이름 지정
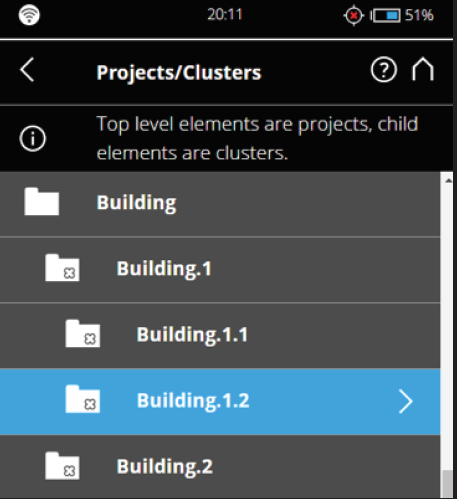
스캐너에서 더 큰 프로젝트를 설정할 때 쉽게 등록할 수 있도록 스캔 클러스터로 그룹화할 수 있는 영역을 식별하는 것이 좋습니다. Manage(관리) > Projects/Clusters(프로젝트/클러스터)에서 프로젝트와 하위 프로젝트 이름을 설정할 수 있습니다.
각 스캔 프로젝트와 프로젝트 내의 폴더에 의미 있는 이름을 지정합니다. 예를 들면 케이스 번호나 작업 번호, 클라이언트 이름 또는 번호, 거리명 등이 좋습니다. 다층 건물 프로젝트는 다음과 같은 파일 구조를 가질 수 있습니다.
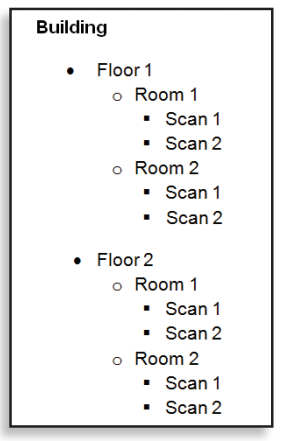
스캐너에서 이 파일 구조를 만드는 가장 쉬운 방법은 하위 프로젝트를 추가하고 스캐너가 각 하위 프로젝트와 각 스캔의 이름을 자동으로 지정하도록 하는 것입니다.
장비 점검
- 스캐너 삼각대를 점검하여 모든 다리가 확실히 고정되고 스캐너가 올바르게 부착되었는지 확인합니다.
- 스캐너의 외부 케이스에 손상이나 뒤틀림 흔적이 있는지 확인합니다.
- 스캐너 거울에 먼지, 긁힘, 균열, 뒤틀림이 있는지 확인합니다. 레이저 스캐너 미러 청소에 대한 자세한 정보가 필요하면 여기를 클릭하십시오.
인공 표적
등록하려면 스캔을 정렬하는 데 사용할 수 있는 스캔 위치(각진 표지판, 문, 가로등 기둥 등)에 고유한 기능이 있어야 합니다. 평평하게 뻗은 도로 또는 각진 방과 같은 장소는 스캔 등록 과정을 돕기 위해 인공 표적이 필요합니다.
표적 구체는 거의 모든 위치에 배치될 수 있고, 임의의 각도로부터 스캔될 수 있어, 종이 표적이 부착될 수 있는 표면이 없는 사이트에 유용한 옵션으로 활용할 수 있습니다. FARO 구체는 엄격하게 생산되며 정확도 임계값이 엄격한 프로젝트에 적합합니다.

체커보드 표적은 필요에 따라 쉽게 인쇄, 라벨링 및 크기 조정이 가능하지만 평평한 표면에 부착하고 스캐너에 수직으로 배치해야 합니다.
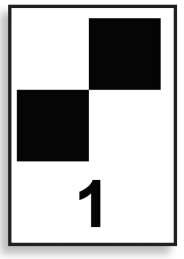
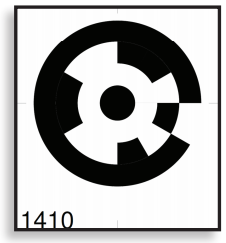
코딩된 마커는 체커보드와 같은 기능을 하지만 고유 번호가 있는 광학 바코드를 포함합니다. 이러한 고유 마커는 스캔 위치를 결정하고 자동 등록을 용이하게 하는 데 도움이 됩니다. <설치 경로>\ RegistrationMarkers\ REGISTRATIONMARKERSA4.PDF에서 SCENE을 설치한 후 인쇄하거나 이 페이지에서 다운로드할 수 있습니다.
표적 배치
인공 표적 지침
- 등록하려면 적어도 세 개의 표적이 필요합니다. (센서 데이터를 사용할 경우에는 두 개, 예: 경사계)
- 스캐너에서 표적까지 가시선이 명확해지도록 표적을 정렬합니다.
- 각 표적이 두 개 이상의 스캐너 위치에서 보이는지 확인합니다.
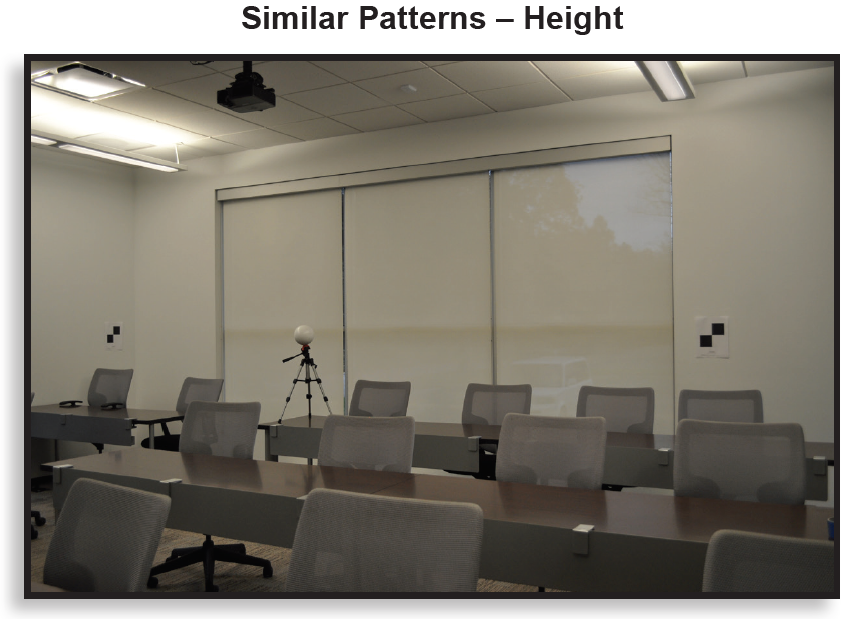
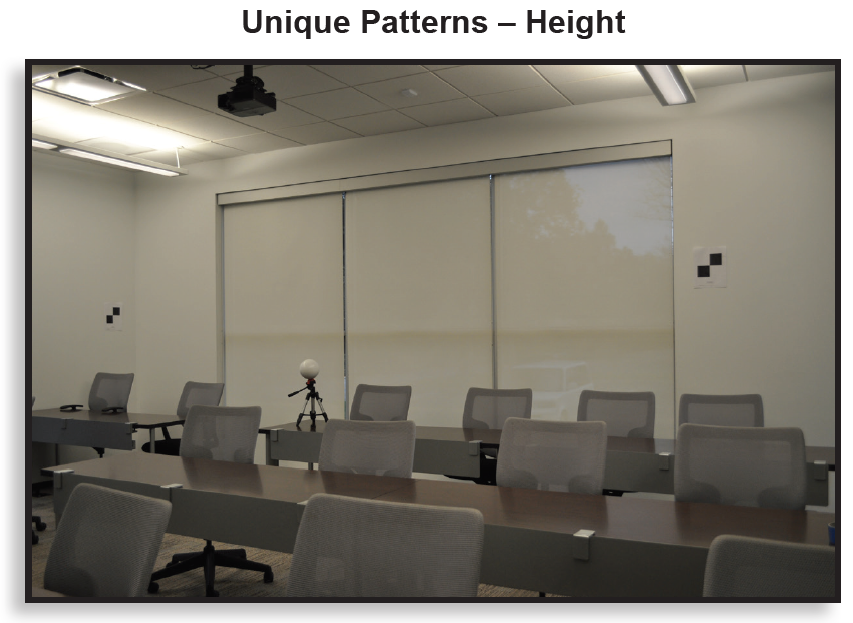
- 표적의 높이와 간격을 달리하여 고유한 패턴으로 표적을 3차원으로 정렬합니다.
- 스캔하는 동안 표적을 이동하지 마십시오.
참조
배터리/확장 코드
필요한 전력은 스캔 프로젝트 유형에 따라 달라집니다. 배터리 충전 시간과 사용 가능한 콘센트에 맞춰 적절하게 계획하십시오. 장시간 스캔하는 동안 스캐너가 콘센트에 연결되어 있는 경우에는 전원 코드가 손상되지 않도록 코드 보호기 사용을 고려하십시오.
정확도 검사
FARO Scale Bar 또는 미터/야드 스틱과 같은 알려진 길이의 품목을 첫 스캔 영역에 두면 등록 완료 후 스캔의 정확도를 확인하는 데 도움이 됩니다. 정확도 임계값이 더 높은 프로젝트에서 스캔 정확도를 높일 수 있도록 FARO Scale Ba는 1500mm의 인증된 길이로 되어 있으며 추가 문서도 제공합니다.

추가 스캐너
핸드헬드 FARO Freestyle은 더 작은 물체와 공간에 대한 지점 데이터를 캡처합니다. Freestyle 데이터는 SCENE의 Focus 데이터와 함께 등록할 수 있습니다.

스캐너 위치 수
스캐너 위치를 최소화하면 스캔 시간이 단축되고 지점 데이터가 적절하게 캡처됩니다. 사이트 스케치를 사용하여 최적의 스캔 위치를 식별합니다. 각 스캔이 다른 스캔과 겹치는 위치에 스캐너를 놓습니다. 스캔 영역은 스캔을 등록하는 데 도움이 되는 고유한 자연 표적을 포함해야 합니다. 관심 대상 물체에 따라 전체 360° 스캔이 매번 필요하지 않을 수도 있다는 점에 유의하십시오. 등록에 도움이 되도록 출입구와 같은 전환 영역을 스캔합니다.
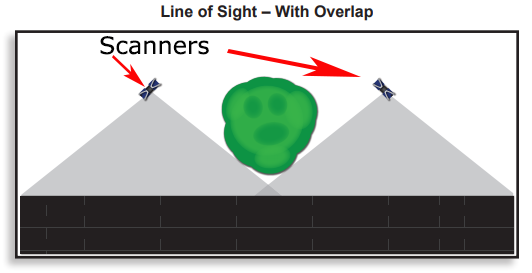
가시선
나무나 기둥과 같은 장애물을 스캔할 때에는 물체 주변의 모든 스캔 데이터가 캡처될 수 있도록 스캔 위치를 조정해야 하는 경우가 많습니다. 여러 스캔 또는 스캐너 작업 시 스캔 영역이 장애물 너머에서 겹치는지 확인하십시오.
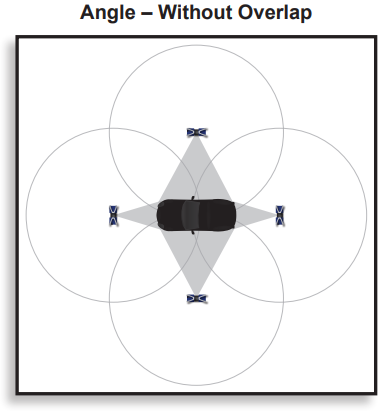
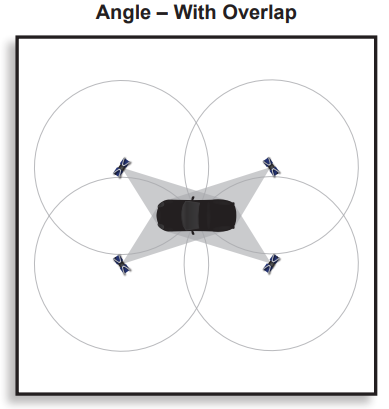
관심 대상에 대한 각도
서로 다른 각도에서 캡처된 여러 스캔은 가장 완벽한 3차원 이미지를 제공합니다. 올바른 각도를 선택하면 필요한 스캔 횟수를 줄일 수 있습니다. 스캐너를 관심 대상에 대한 각도로 배치하여 필요한 세부 사항을 캡처하는 데 가장 적합한 가시선을 제공하고 스캔에 겹치는 영역이 있는지 확인합니다.
이등분
중지/시작 지점이 관심 대상 또는 인공 표적에 놓이도록 스캐너를 배치하지 마십시오. 시작/중지 라인 또는 이음새는 최소 관심 영역을 향해야 합니다.
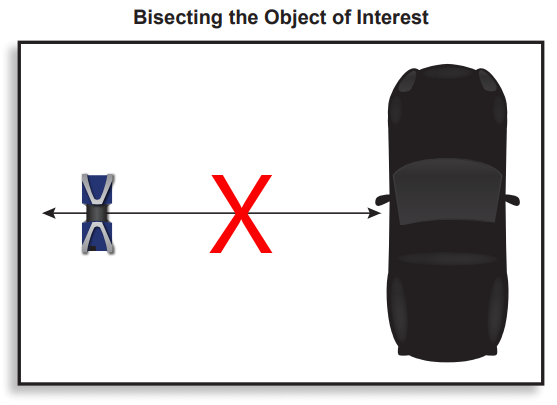
간단한 경험 법칙으로 스캐너 측면에 있는 스캐너 터치 스크린을 사용할 때 관심 대상을 향하도록 하는 방식이 있습니다.
스캔 순서가 중요합니다
논리적인 순서로 스캔하면 등록이 훨씬 쉬워집니다. 관심 대상에 동그라미 표시를 하거나 구조를 선형으로 진행하면 스캔을 추적하고 등록하기가 더 쉬워집니다. 프로젝트 영역의 스케치에서 스캔 순서를 따르는 것이 어려울수록 나중에 스캔을 등록하는 것이 더 어려워집니다.
스캔면
관심 스캔 대상이 물 위의 보트와 같이 움직이는 면에 놓여 있는 경우, 작은 움직임이 측정 데이터에 영향을 미치지 않도록 스캐너를 동일한 이동 면에 놓는 것이 좋습니다.
ScanPlan 및 Scan Assist
FARO 핸드헬드 2D 스캐너인 ScanPlan을 사용하면 빠르게 건물 평면도를 만들 수 있습니다. ScanPlan의 Scan Assist 모드를 사용하면 Focus 스캐너를 배치하기에 가장 적합한 위치가 제안됩니다. 자세한 Scan Assist 사용법은 이 문서를 참조하십시오.
스캔 해상도
스캔 해상도는 수집된 데이터 지점의 수와 해당 지점 간 거리를 나타냅니다. 필요한 세부 수준, 관심 대상까지의 거리 및 표적까지의 거리에 따라 해상도를 선택하십시오.
일반적인 해상도 지침
- 1/1 또는 1/2 - 대상 및 작은 영역
- 1/4 또는 1/5 - 실외 및 넓은 실내 공간
- 1/8 또는 1/10 - 실내 및 소규모 실외 공간
스캔 품질
스캔 품질은 스캐너가 지점 데이터를 확인하기 위해 수행하는 측정 수를 나타냅니다. 이 설정을 늘리면 스캔 정확도가 향상되지만 스캔 시간도 증가합니다. 또한 품질 설정에는 스캔 지점 차이가 대상 세부 사항이나 노이즈로 인한 것인지 여부를 결정하는 알고리즘인 노이즈 감소 기능이 사용됩니다.
일반적인 품질 지침
- 2x – 최적의 조건(좋은 조명, 좋은 날씨)에서, 그리고 시간이 관심사인 경우
- 3회 – 흐린 상태의 실내 또는 실외
- 4x – 긴 거리 스캔이 필요한 경우 햇볕이 잘 드는 실외 또는 악천후일 때
수평/수직
이 설정은 180° 스캔 또는 기타 하위 섹션에 사용하기 적합하도록 스캐너의 스캔 영역을 제한할 수 있습니다.
참고: 이 설정은 계속 유지되므로 다음 스캔으로 넘어갈 때 잊지 말고 재설정하십시오.
컬러
스캔 영역이 매우 어둡거나 시간이 중요한 경우 컬러를 끄면 스캔 시간이 단축됩니다.
참고: 원시 스캔의 일부 표면은 스캐너의 근적외선 특성과 가변적인 반사/강도 값으로 인해 바랜 것처럼 보일 수 있습니다. 스캔이 컬러로 표시되면 이러한 세부 사항이 보입니다.
노출 계량
- Even Weighted(고른 가중치): 조명이 비교적 균일한 경우에 적합한 이 설정은 전체 장면에서 나오는 빛을 사용하며 시간이 덜 소요됩니다.
- Horizon Weighted(수평 가중치): 밝은 오버헤드 조명이 있는 장면에 적합한 이 설정에서 카메라는 수평으로 나오는 빛을 사용합니다.
- Zenith Weighted(정점 가중치): 눈높이 이하에서 밝은 조명이 비치는 장면에 적합한 이 설정에서 카메라는 위쪽에서 들어오는 빛 정보를 사용합니다.
미리 정의된 스캔 프로파일
프로젝트에 요구되는 사항을 결정하는 가장 빠른 방법은 스캐너에서 미리 정의된 스캔 프로파일을 사용하는 것입니다.
최신 모델: 포커스 코어, 포커스 프리미엄, 포커스 프리미엄 맥스
| 프로파일 | 다음과 같은 경우 사용 | 해상도 | 품질 | 컬러 | 센서 |
|---|---|---|---|---|---|
| 가속 | 실내에서 스캐너와 대상물 사이의 거리가 10m 미만인 경우 | 1/8 | 3X | 오프 | 온 |
| 표준 | 실내에서 스캐너와 물체 사이의 거리가 10m 이상일 경우 | 1/5 | 3X | 오프 | 온 |
| 확장 | 실외, 스캐너와 관심 물체 사이의 거리가 20m 이상입니다. | 1/4 | 3X | 오프 | 온 |
| 플래시2 | 실내에서 스캐너와 대상물 사이의 거리가 10m 미만인 경우 | 1/43 | 2x | 온 | 오프 |
| 오브젝트 HD1 | 더 가까운 물체를 위한 고해상도 스캔 | 1/2 | 4X | 온 | On |
참고1: 개체 HD 프로필은 8MPx 해상도의 내부 카메라를 사용합니다(고해상도 설정만 13MPx 사용). 또한 가까운 거리에 있는 물체에 대해서는 근거리 범위 설정을 사용합니다.
참고2: 플래시 프로필은 유효한 라이선스가 있고 FARO Stream 앱을 사용하는 경우에만 사용할 수 있습니다. 플래시는 리코 세타 Z1과 정확도는 떨어지지만 대략적인 경사계 수치가 표시되는 PanoCam 액세서리를 사용합니다.
참고3: 1/4 수직 해상도 및 3rpm(10초) 수평 해상도
일반 정보:
위에서 언급한 사전 정의된 프로필을 사용자 지정하여 복제하거나(플래시에는 유효하지 않음) 새 프로필을 만들 수 있습니다. 환경별 스캔에는 사용자 지정 프로필을 사용하세요. 스트림 프로필은 여러 디바이스 간의 충돌을 피하기 위해 Focus 스캐너와 동기화되지 않습니다.
Legacy Models: FocusS, FocusS Plus, FocusM
| 프로파일 | 다음과 같은 경우 사용 | 해상도 | 품질 | 컬러 | 센서 |
|---|---|---|---|---|---|
| 실내... 10m | 실내, 스캐너와 관심 대상 사이 거리가 10m 미만 | 1/8 | 3X | 온 | 온 |
| 실내 10m... | 실내, 스캐너와 관심 대상 사이 거리가 10m 이상 | 1/5 | 4X | 온 | 온 |
| 실내 HDR | 실내, 스캐너와 대상 사이 거리가 20m 미만(HDR 품질) | 1/5 | 4X | 온 | 온 |
| 실외 ...20m | 실외, 스캐너와 관심 대상 사이 거리가 20m 미만 | 1/5 | 4X | 온 | 온 |
| 실외 20m... | 실외, 스캐너와 관심 대상 사이 거리가 20m 이상 | 1/4 | 4X | 온 | 온 |
| 실외 HDR | 실외, 스캐너와 관심 대상 사이 거리가 20m 이상(HDR 품질) | 1/4 | 4X | 온 | 온 |
| 프리뷰 | 빠른 저해상도 스캔 | 1/16 | 4X | 오프 | 오프 |
| 대상 HD | 고해상도 스캔 | 1/2 | 6X | 온 | 온 |
| 실외: 원거리 | 스캐너와 관심 대상 사이 거리가 20m 이상이며 스캐너에 더 가까운 대상의 측정 정확도는 필요하지 않습니다. | 1/4 | 4X | 온 | 온 |
사전 정의된 스캔 프로파일을 필요에 따라 변경할 수 있으며 개별적인 요구에 맞게 사용자 지정 스캔 프로파일을 추가할 수 있습니다.
경사계
기울기가 +/-5° 사이가 되도록 스캐너를 배치해 보십시오. 상태 표시줄의 경사 경고 아이콘( )은 스캐너의 현재 기울기가 2° 이상(아이콘이 노란색으로 바뀜)일 때만 표시되며 스캐너가 5° 이상 기울어지면 이 아이콘이 빨간색으로 바뀝니다.
)은 스캐너의 현재 기울기가 2° 이상(아이콘이 노란색으로 바뀜)일 때만 표시되며 스캐너가 5° 이상 기울어지면 이 아이콘이 빨간색으로 바뀝니다.
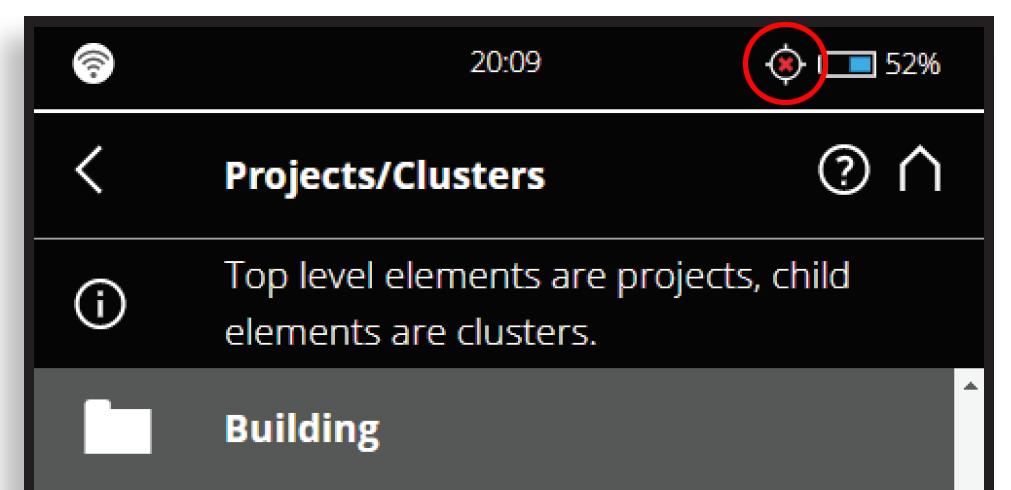
Home(홈) > Parameters(매개 변수) > Select Sensors(센서 선택)를 선택하여 경사계를 평평하게 맞출 수 있습니다. 여기 보여진 것은 스캐너 상단에 장착된 경우에 나타나는 것처럼 불스아이 버블 레벨 경사계입니다.
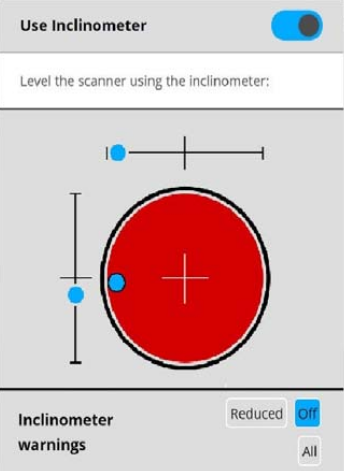
SCENE에서 스캔 등록을 위한 경사계의 경사도 측정 자동 사용을 활성화 또는 비활성화할 수 있습니다. 그러나 설정에 관계없이 이 센서의 데이터는 항상 측정되며 각 스캔에 첨부됩니다. 경사계 데이터를 사용하도록 설정되어 있으면 SCENE에 자동으로 스캔을 등록합니다. 꺼져 있으면 데이터가 무시됩니다.
뒤집어서 스캔하는 경우에는 경사계를 꺼야 합니다.
참고: 실외 또는 표면이 불안정한 지역에서 스캔하는 경우 다음 스캔으로 넘어가기 전에 경사계 버블을 다시 확인하십시오. Manage(관리) > Sensors(센서) > Inclinometer(경사계)를 선택합니다. 경사계가 빨간색 영역에 있는 경우에는 스캐너의 수평을 다시 조정하고 삼각대 다리가 안전하고 안정적인지 확인한 다음 다시 스캔하십시오.
악천후
문제가 있는 표면
- 밝음 – 밝은 표면은 스캔 노이즈 증가와 측정 데이터 손실의 원인이 될 수 있습니다. 스캔 품질을 높이면 이러한 표면의 영향을 줄이는 데 도움이 됩니다. 밝기가 더 심한 상황에서는 마스킹 테이프나 페인터 테이프로 표면을 덮으십시오.
- 반사성 – 거울이나 기타 반사성이 높은 표면은 스캔이 어려울 수 있습니다. 갈색 종이나 테이프로 표면을 덮으면 영향을 최소화할 수 있습니다.
- 유리 – 빛이 유리를 통과하면 속도가 변합니다. 유리를 통한 스캔은 측정 신뢰도가 낮아질 수 있으므로 피해야 합니다.
- 물 – 물은 빛을 너무 많이 굴절시켜 스캔 결과를 신뢰할 수 없게 되므로 피해야 합니다.
- 매우 뜨거운 표면 – FARO 스캐너는 적외선으로 작동합니다. 따라서 표적의 온도 외에 가장 중요한 것은 휘도, 또는 적외선 스펙트럼 내에서 방출될 빛의 양입니다. 모든 물체는 IR(적외선)을 방출하며, 온도가 증가함에 따라 방출되는 IR의 양이 증가합니다. (섭씨 수백 도를 초과하는) 극도로 뜨거운 물체는 반사하는 양보다 더 많은 IR을 방출하는 경향이 있습니다. 이러한 극한 온도에서는 스캐너에서 방출되는 모든 레이저 파워가 반사되어 돌아올 가능성이 낮습니다. 이 경우 스캔 데이터가 누락되고 부정확할 수 있습니다. 일반적으로, 결과를 예측할 수 없으므로 500°C보다 뜨거운 대상을 스캔하는 것은 권장되지 않습니다.
현장 등록
레거시 모델: FocusS, FocusS Plus, FocusM
현장 등록 시 한 번의 스캔을 하든, 동시에 여러 개의 스캔을 하든 관계없이 스캔 데이터가 현장 PC로 무선으로 직접 전송되고 자동 정렬됩니다. .
신규 모델: Focus Core, Focus Premium, Focus Premium Max
현장 등록에는 FARO Stream 앱(Google 및 Apple 스토어에서 이용 가능) 사용을 권장합니다. Stream은 새로 캡처된 스캔을 자동으로 등록합니다. Stream은 자동 상단 뷰 및 클라우드 간 기반 등록 방식을 사용합니다. 이 자동 등록은 각 스캔 완료 후 자동으로 수행됩니다. Stream에서 수동 등록을 수행하고 스캔 연결을 추가할 수도 있으며, 이는 SCENE에서 최종 처리 단계로 정밀 등록에 활용할 수 있습니다.
자세한 내용은 Stream 매뉴얼의 “Focus 스캔 등록” 장을 참조하십시오.
스캐너 안전
- 주의: 스캐너를 방치하지 마십시오.
- 스캔 영역에서는 가능한 한 이동을 제한하십시오.
- 삼각대 다리를 따라 페인터 테이프를 붙이거나 적당한 크기로 다듬은 스위밍 누들로 감싸 스캐너가 눈에 잘 띄게 하십시오.
- 코드 보호기를 사용하여 스캐너에 부착된 전선을 덮으십시오.
- 삼각대에 있는 스캐너를 옮길 때는 항상 한 손으로 스캐너를 잡으십시오.
- 지면이 불안정한 경우(예: 모래, 먼지가 살짝 쌓인 곳 또는 산업용 그레이팅)에는 진동 억제 패드를 사용하거나 테니스 공에 삼각대 다리를 끼우거나 오래된 컴팩트 디스크 또는 가구용 슬라이더 위에 다리를 놓아 보십시오.
PanoCam
파노캠 액세서리는 1초 만에 컬러 처리된 360° 사진을 촬영하여 스캔 과정을 가속화합니다.
모든 V8 및 V9 포커스 스캐너에 대해:
| 모델 | HDR(하이 다이나믹 레인지) |
|---|---|
| Focus V8 레거시: FocusS, FocusS Plus, FocusM | 사용 불가 |
| Focus V9: Focus Core, Focus Premium, Focus Premium Max | 선택적 설정 |
일반 정보:
- 파노라마 카메라를 Focus 스캐너에 부착하려면 파로 파노캠 마운트(파로 품목 ACCS-0016)를 사용합니다. Ricoh Theta Z1 카메라에만 적용됩니다. 최신 Focus 및 Ricoh Theta Z1 카메라 펌웨어를 사용하십시오(https://support.theta360.com 참조).
- 주의! Ricoh Theta Z1과 PanoCam 마운트를 조립하는 동안 카메라 나사를 과도하게 조이지 마십시오. 카메라 또는 마운트가 손상될 수 있습니다. 항상 동일한 힘과 방법으로 카메라 나사를 조이는 것이 좋습니다. 자세한 정보와 세부 사항은 Focus 사용 설명서를 참조하십시오.
- 최상의 스캔 컬러화 결과를 얻으려면 PanoCam 마운트와 리코 세타 Z1을 조립한 후 PanoCam 보정 스캔을 수행해야 합니다. Sphere XG에서 PanoCam 스캔을 처리하려면 현재 업로드하기 전에 각 프로젝트에서 Panocam 보정 스캔을 캡처해야 합니다.
- PanoCam 마운트 및 포커스 스캐너의 커넥터 접점을 수시로 청소하는 것이 좋습니다. 면봉과 이소프로필 알코올을 사용합니다.
스토리지
모든 V8 및 V9 포커스 스캐너에 대해:
| 모델 | SSD(솔리드 스테이트 드라이브) |
|---|---|
| Focus V8 레거시: FocusS, FocusS Plus, FocusM | 사용 불가, SD 카드만 가능 |
| Focus V9: Focus Core, Focus Premium, Focus Premium Max | 통합 SSD 또는 SD 카드로 작동 |
일반 정보:
스캔 프로젝트는 저장소 관리의 설정에 따라 SSD 또는 SD 카드에 저장됩니다. SSD에 저장된 프로젝트는 SD 카드로 내보낼 수 있습니다. 통합 SSD를 사용하는 것이 좋습니다. SD 카드를 사용하고 자동 SD 카드 동기화를 설정하면 스캔 캡처 시간이 늘어납니다. 이 설정은 관리 > 저장소 관리에서 검토할 수 있습니다.
참고: 프로젝트의 모든 스캔은 동일한 저장 매체에 저장해야 합니다. 스캔 프로젝트 중에 내부(SSD)와 SD 카드 저장소 사이를 전환하지 마세요.